Newton Univariate Root Method
Aim:
- To find the root/s i.e where the function intercepts the x-axis
General Form:
- General formula for Newton’s Univariate Root approximation:
from sympy import symbols, diff, lambdify, parse_expr
x = symbols('x')
def newton_uni_root_method(f_sym, x0, tolerance=0.0005, max_iterations=100):
# Convert symbolic function to a numerical function
f = lambdify(x, f_sym, 'numpy')
df_sym = diff(f_sym, x)
df = lambdify(x, df_sym, 'numpy')
results = []
k = 0
xk = x0
while k < max_iterations:
f_xk = f(xk)
df_xk = df(xk)
# Avoid division by zero
if df_xk == 0:
raise ValueError(f"Zero derivative. No solution found at x = {xn}")
# Newton univariate method update
delta = - f_xk / df_xk
xk1 = xk + delta
results.append((k, xk, f_xk, df_xk, delta, xk1))
if abs(xk1 - xk) < tolerance:
break
xk = xk1
k += 1
return resultsExample
with initial guess
which is a decent guess looking at the plot of the function
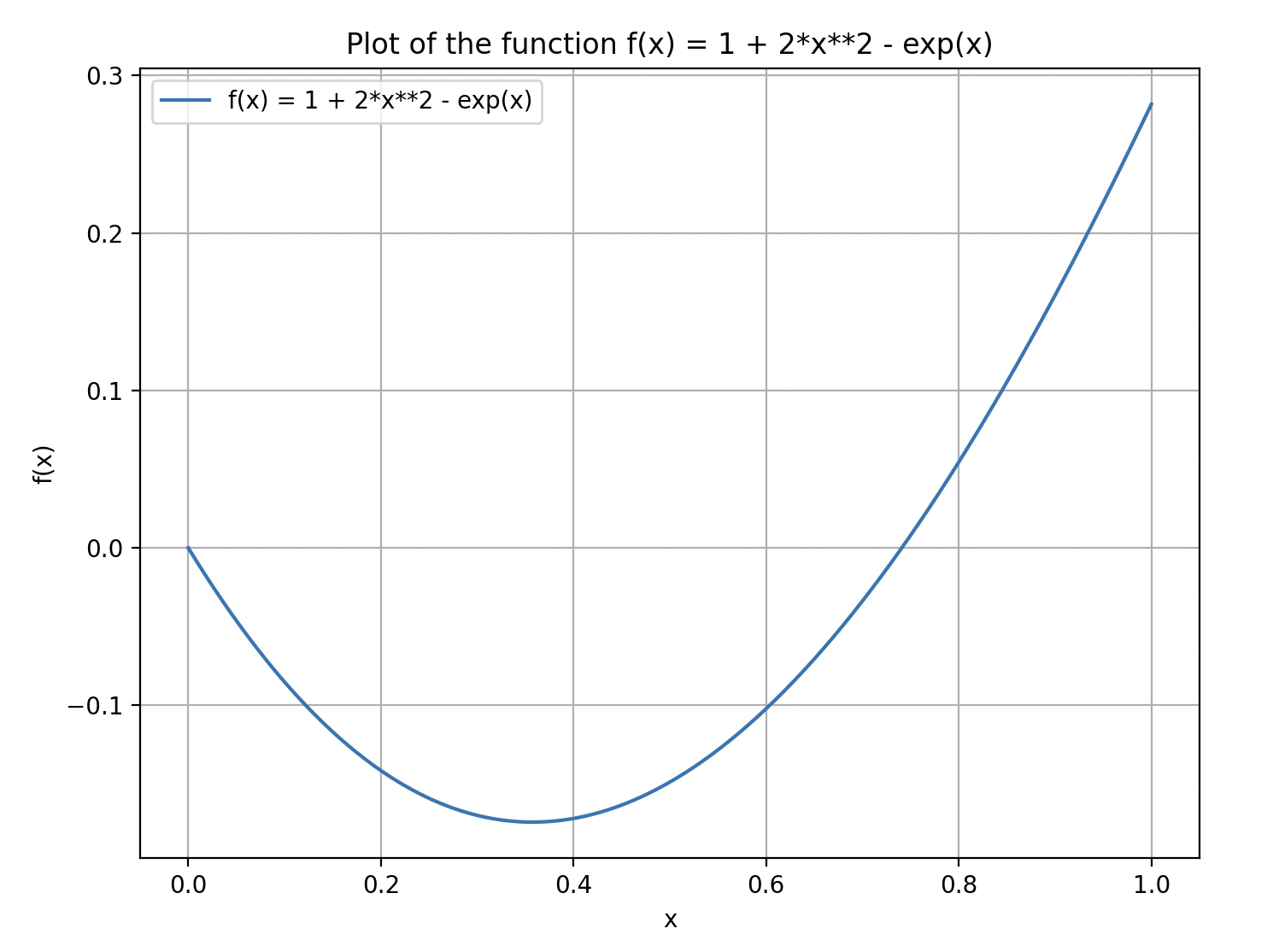 The x-intercepts of the function will be at x = 0 and another x-value somewhere between 0.6 and 0.8
The x-intercepts of the function will be at x = 0 and another x-value somewhere between 0.6 and 0.8
Following the algorithm for newton univariate roots, we can tabulate the key values in a table as follows
| 0 | 0.8 | 0.054 459 | 0.974 459 | -0.055 886 |
| 1 | 0.744 114 | 0.002 835 | 0.871 879 | -0.003252 |
| 2 | 0.740 862 | 0.000 010 | 0.865 705 | -0.000 012 |
| 3 | 0.740 850 | - | - | - |
| using a tolerance of 0.0005 to stop the algorithm results in | ||||
| Next we’re going to look at Newton Univariate Method |